 Tweet
Tweet
Language in Common...
Shouldn't it be the other way around?...As the FET pulses go up...the RPM's go higher...FET's Drive Machine...Machine do not drive FET's...
But yes, that is the way it goes, just like in any Symmetrical Pulsed Motor Controller...
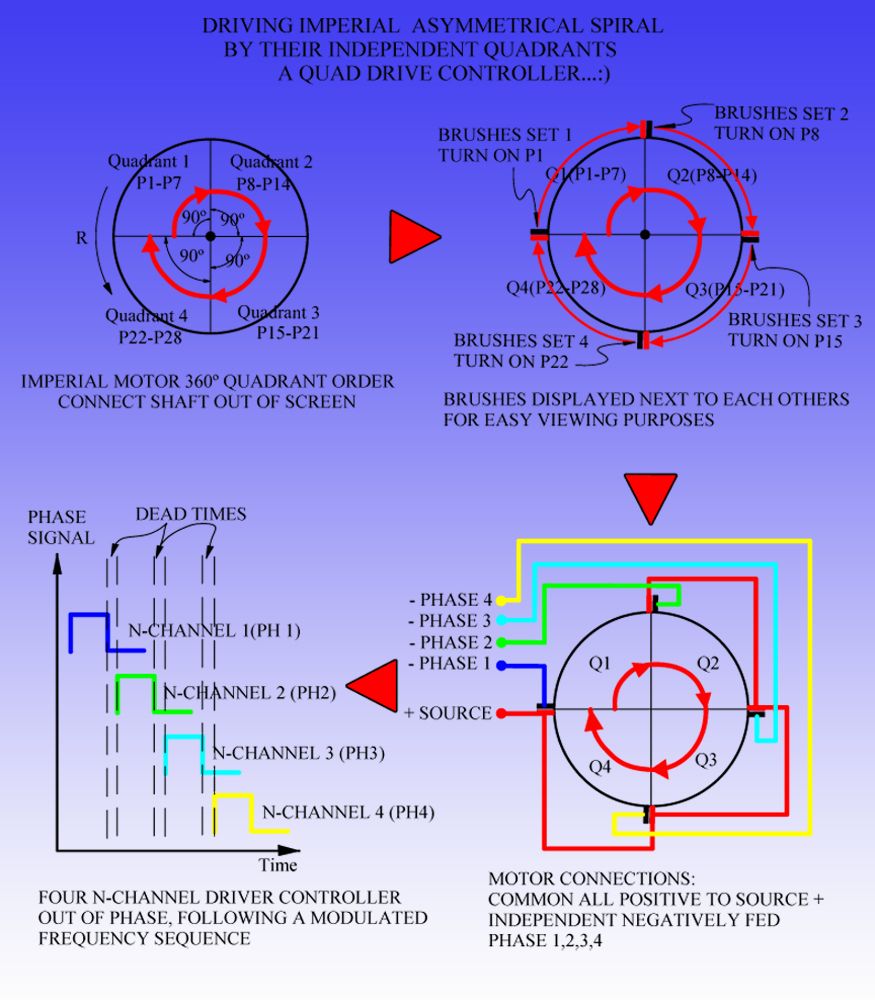
Ok, first off, let's set the "Roll" of each system, the FET's Pulses Drive the Motor, now the Motor is an endless spinning Spiral Cycle, and FET's could "catch on" at ANY given Point within the 360� Quadrant, and from there on, they will take over the feed control.
Now, getting more technical...This Machines express a common Language as the FET's do...and that is Frequency (Hz)...for a given speed/torque output they have a close range of Hertz up to KHz...So say we want to retain a range @3600 Steady RPM's...so let's Scope Motor Output for Frequency (using Input will get your own FET's Pulses... ) So the perfect Machine expression (as isolated from Input) will come from its output naturally reversed pulses...like a response to the Input...understand me so far?
Oh, yes, they are Independently energized just like the Inductors on a SEPIC...However, they DO are mounted on same core...and that is the Armature Core, Lester...
I have run my BOSCH with the simplest SEPIC...there could be...a 555 Oscillator with FET Drains...a suitable AC Metalized Cap, and an Ultrafast NTE576 Diode...Motor runs excellent...as output is also great. Of course, have to realize the actual SEPIC...is spread all over...
Yes, indeed it could be done that way...I mean, speed sensors exist and so ...that can translate into Mileage, Speed taken into Miles Per Hour... read outs...or Hours of running time, etc,etc...We could also use them for sensors to keep desired speed...However, please review the first part where I mentioned about the common Hz Language...from Input-Output...then we realize no speed sensor would be required IF we have the system read based on Frequency instead of speed...so, all we do is to raise Frequency where the parameters (speed/hertz) meet our requirements...right?
Regards
Ufopolitics
Originally posted by Lester444
View Post
But yes, that is the way it goes, just like in any Symmetrical Pulsed Motor Controller...
2. Can you please shed more light on the "timing" relationship with regards to the pulse (one single pulse) and the commutator (one winding pair)?
I mean the synchronization of the VOLTAGE pulse (rising edge & falling edge, the turning-on and turning-off of the FET) relative to the brushes' positions on the commutator.
I mean the synchronization of the VOLTAGE pulse (rising edge & falling edge, the turning-on and turning-off of the FET) relative to the brushes' positions on the commutator.
Now, getting more technical...This Machines express a common Language as the FET's do...and that is Frequency (Hz)...for a given speed/torque output they have a close range of Hertz up to KHz...So say we want to retain a range @3600 Steady RPM's...so let's Scope Motor Output for Frequency (using Input will get your own FET's Pulses...
) So the perfect Machine expression (as isolated from Input) will come from its output naturally reversed pulses...like a response to the Input...understand me so far?
3. As to the SEPIC topology, can you please tell us the timing (phase relationship) of L1 relative to L2? From what I understand L1 and L2 are on different rotor poles and so can not be regarded as being on the same core (timing-wise) as in your drawing. L1 & L2 are independent coils as you have pointed out and so perhaps should be presented (drawn) independently also.
I have run my BOSCH with the simplest SEPIC...there could be...a 555 Oscillator with FET Drains...a suitable AC Metalized Cap, and an Ultrafast NTE576 Diode...Motor runs excellent...as output is also great. Of course, have to realize the actual SEPIC...is spread all over...
It seems to me that some sort of timing actuator (optical encoder, hall-effect gear-tooth sensor, etc.) is mandatory at this time. I don't suppose you simply want to "fire away" with fixed pulses and hope it hits the mark, right?
Thanks!
Lester444
Lester444
Regards
Ufopolitics


 [/IMG]
[/IMG]

Comment