Originally posted by bistander
View Post
-
Re: 7537 Midaz post about my questions on AN-1,2,3 Gchilders tests
So that sounds like the single coil subtends 2 poles in AN-2 then in a 5-pole embodiment? And where are the brushes placed, like AN-3, or the thee-pole diagram?Originally posted by Midaztouch View Post
Thanks MidazLast edited by sampojo; 04-28-2015, 11:57 PM.Leave a comment:
-
OK. Thanks UFO. The journey continues.Originally posted by Ufopolitics View Post
Carry on Hunting
markLeave a comment:
-
This is correct UFO. The 'Beast' series of motors was two OEM motors back to back just as Sampojo's build. The hardware worked perfectly well. The different windings also gave excellent RPM...the torque was lacking.Originally posted by Ufopolitics View Post
All the SC series are completely standard OEM motors except one extra pair of brushes are added, then wound to suit (pairs/groups) etc.Originally posted by Ufopolitics View Post
The bottom line is 'someone' dug up an old schematic, which was wrong for reasons we do not need to discuss. The motor (way back then) was then wired to correct for the error. Just recently the schematic was called incorrect thereby suggesting it could be done correctly. It remains a fact of simple geometry that the 12 pole motor can not be wired as a 4 pole pairs motor and comply with the 'connect/disconnect' requirements for efficient function.Originally posted by Ufopolitics View Post
Interestingly, and somehow, ALL my motors have been branded because of one old schematic. BUT the point that seems to be missed is this...none of my current motors are 'pairs'. If I try a 'pairs' configuration again it would need to be lapping by two poles (at least). So there is nothing sudden about the about the motors just tested. They were designed with correct timing AND they were built with correct timing.Originally posted by Ufopolitics View Post
Happy Hunting
markLeave a comment:
-
I got what you were saying. When you get to the 4 magnet motors. Will your 2 magnet findings matter much?Originally posted by Gary
TORQUE vs wattage was the ONLY concern in the past for the 5pole.
These motors are unique. I not cared about the wattage no load... It's all about Underload for me!
Keep it Clean and Green
MidazLast edited by Midaztouch; 04-29-2015, 12:16 AM.Leave a comment:
-
Hey Garry,Originally posted by GChilders View Post
Normally in Two Stator small motors the Symmetry Plane sets their brushes to Divide the Stators by their Bisector...maybe a few degrees to either side...but typically it is a normal setting, that is why I assumed it was similar to our Neutral Timing.
But you are doing great friend, keep going you will get there!
Now, are you sure your AN1 and AN2 did 0.08 Amps with that Input Volts and output those RPM's?...because that is VERY LOW Amps Garry!
It looks like Science Fiction friend!
Take care
UfopoliticsLeave a comment:
-
Originally posted by HuntingRoss View Post
Mark,
I already tried that 'option' with Diodes once...and it happens on a motor exactly as yours...a 12 pole:
[IMG]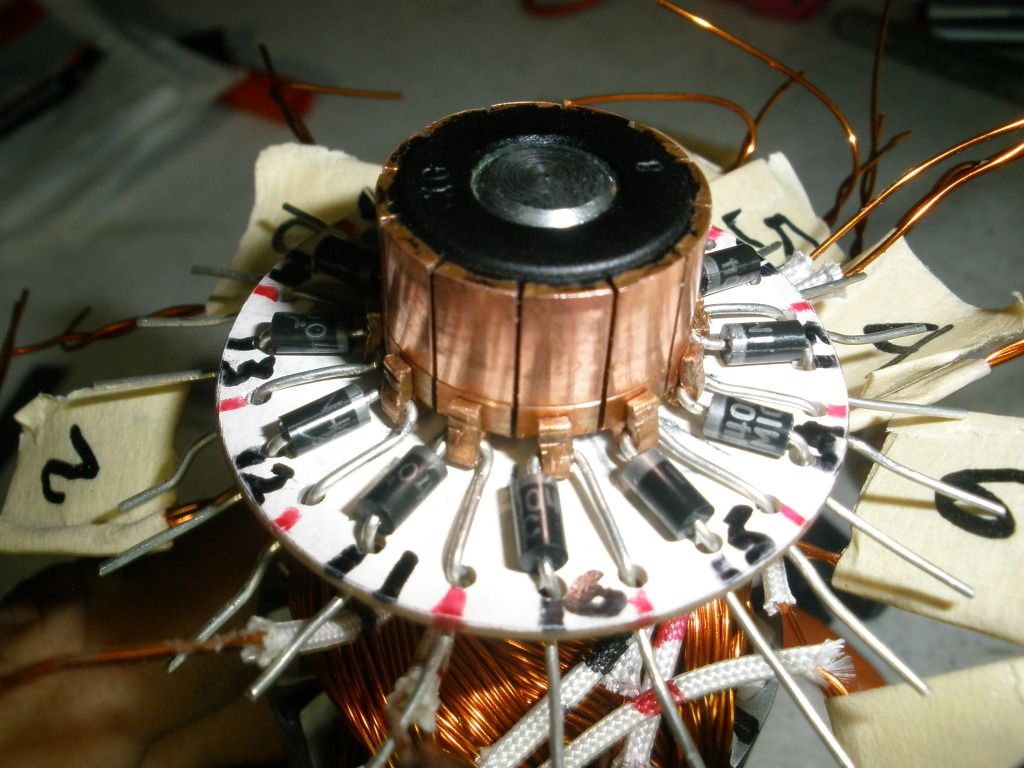 [/IMG]
[/IMG]
[IMG] [/IMG]
[/IMG]
[IMG]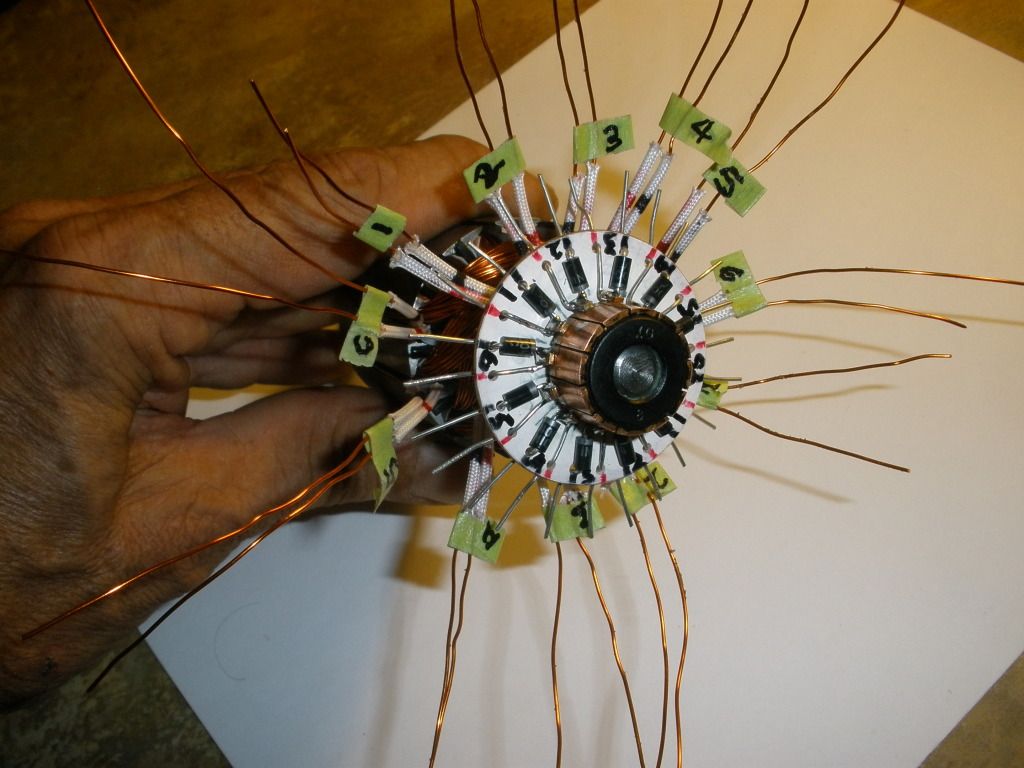 [/IMG]
[/IMG]
[IMG]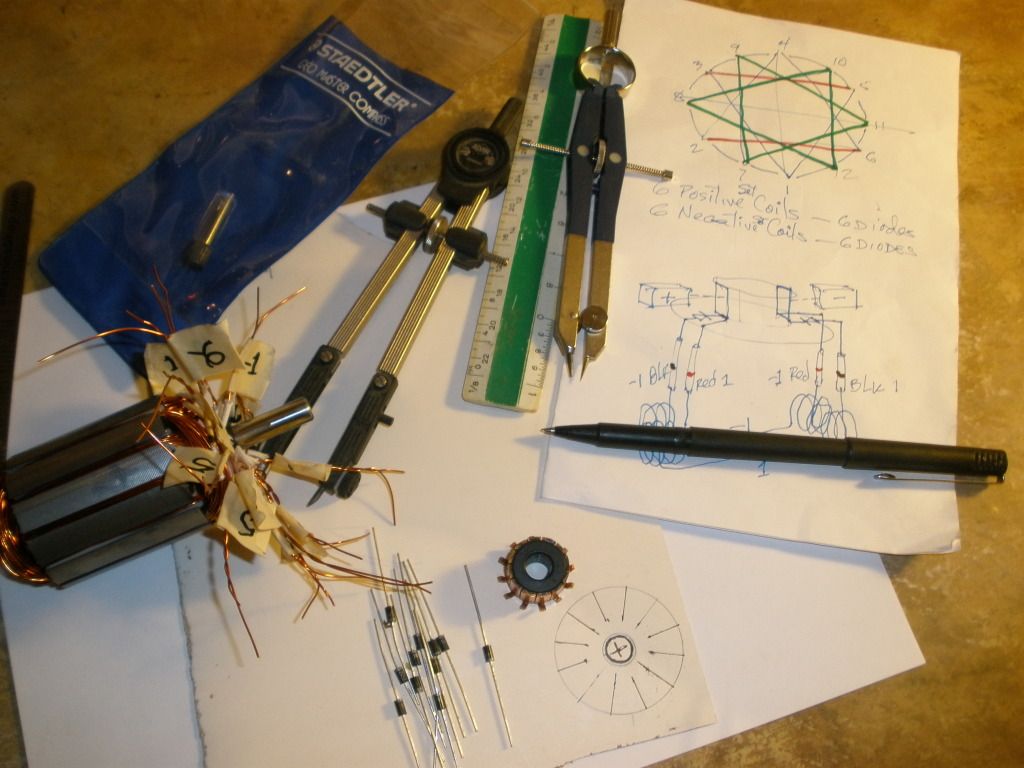 [/IMG]
[/IMG]
[IMG]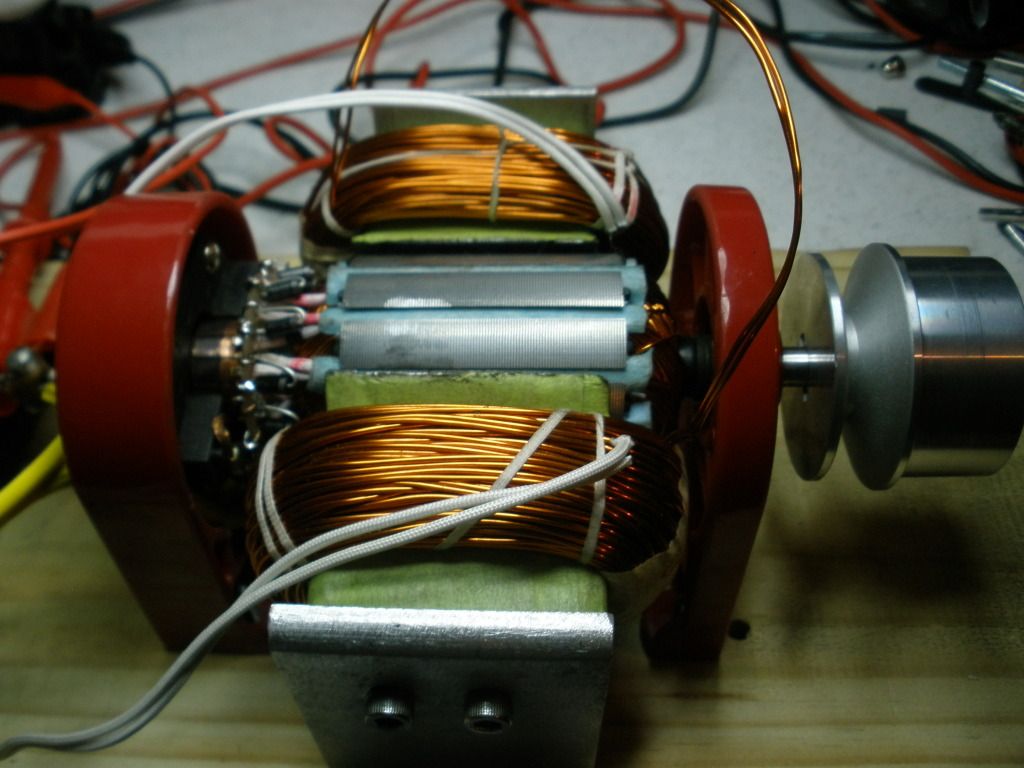 [/IMG]
[/IMG]
It may look very nice, and yes, a LOT of WORK...BUT IT DON'T WORK!
Sorry!
Keep Hunting!...
UfopoliticsLast edited by Ufopolitics; 04-28-2015, 10:24 PM.Leave a comment:
-
Originally posted by HuntingRoss View Post
Mark,
On your first Motor built, you were having issues on pulling one of the commutators...so you 'decided' to build Two Stators and Two sets of Magnets and join two embodiments...Now, that, for whatever reason is not an exact Replication of the Asymmetric Motor.
I have NEVER joint Two Rotors, nor Two sets of Magnets in my whole 'history' here at Energetic Forum...but you did.
Then you tried all kind of different approaches in the windings which diverge completely from what I have been showing here...First, because like I said before...I have never done that kind of "fusion".
Here, that I know off, maybe one or two experienced Members have done it...and I know Dana (Prochiro) has done it in a smaller version...as I believe Sam (Sampojo) as well...and both replications were successful.
Is your new SC7 a Two Rotor and Two Stator Assembly still?On the Prony tests the motors were between 14 and 19% behind the OEM quoted efficiency of >70%. Which for hand built, I'm guessing, is to be expected. Either way the efficiencies don't seem bad enough to negate any gain the asymm design should deliver.
To date, every motor I have built has exceeded the OEM RPM...most of them quite dramatically. Only two of them have exceeded the torque, and I can't explain how one doesn't come with the other for all the motors.
I remain undefeated. My latest SC10 gave an increase in RPM and reduction in Watts compared to the SC7 which is all good. The torque exceeds the OEM...BUT...the watts are still too high. If I plug this motor into the scooter it will run the batteries down too fast. And there is not sufficient torque to throttle back and use less Watts.
I feel the answer is close, but it just evades me.
Carry on Hunting
mark
But the bottom line here is that recently you have shown a Motor Diagram I said it will have issues with the Timing...and You accepted it was the 'Geometry' not allowing it...
And now you are saying they are all fine tuned all the sudden?
What did you do now?...did you overlapped coils?...did you set smaller commutators?
But keep 'hunting' you may find where the error is somehow...you are a smart guy...so go for it!
On my end, I have spent too much time here lately while piles of work awaits...so I will see you after I catch up.
Keep going!
UfopoliticsLeave a comment:
-
Question on Diodes
@ All
I have seen it written on this thread that capacitors can be used on the coils...so I'm wondering if diodes can be used to solve one of the key differences between the single comm hybrid that I am currently pursuing and the double comm standard.
The main (and significant) difference between the two builds is the SC motors have to energise the coils north and south which reportedly gives a higher amp draw and also causes the coils to flik-flak as they roll past the brushes every 180�.
If it is possible to incorporate diodes into the hostile environment of a fast spinning motor with fluctuating heat gains then I could isolate the southern path which would then energise 'north' 180� later...no flik-flak and hopefully less amps.
Happy Hunting
markLeave a comment:
-
Should we even care about Horsepower anymore?!
Originally posted by bistander View Post
Below is a graft of a motor. A motor that is in our "Class". Our homemade motor can match the torque... BUT We have double the RPMs @ 48v! GEARING
Graft of a Lynch electric motor 48v = 3000 rpm's = 67rpms per volt... A1MoGen 48v = 7000 rpm's = 146 rpm's per volt
http://lynchmotors.co.uk/pdfs/lmc-lem-200.pdf = $1,800 motor vs A1MoGen $500Last edited by Midaztouch; 04-29-2015, 12:34 AM.Leave a comment:
-
Hi UFOOriginally posted by Ufopolitics View Post
I seem to remember you saying many moons ago, that winding these motors is simple 'that even your grand daughter can do it'...or words to that effect.
And I have to say I agree. Following a schematic is not difficult. Selecting the correct gauge of wire is not catastrophic. Filling the slots is not difficult to comprehend. Even for a complete novice as I was when I joined the forum.
I have built A LOT of double and single comm versions now and my build quality is noticeably better than my first efforts. So I would guess the problem is unlikely to be the build quality.
On the Prony tests the motors were between 14 and 19% behind the OEM quoted efficiency of >70%. Which for hand built, I'm guessing, is to be expected. Either way the efficiencies don't seem bad enough to negate any gain the asymm design should deliver.
To date, every motor I have built has exceeded the OEM RPM...most of them quite dramatically. Only two of them have exceeded the torque, and I can't explain how one doesn't come with the other for all the motors.Originally posted by Ufopolitics View Post
I remain undefeated. My latest SC10 gave an increase in RPM and reduction in Watts compared to the SC7 which is all good. The torque exceeds the OEM...BUT...the watts are still too high. If I plug this motor into the scooter it will run the batteries down too fast. And there is not sufficient torque to throttle back and use less Watts.
I feel the answer is close, but it just evades me.
Carry on Hunting
markLast edited by HuntingRoss; 04-28-2015, 09:35 PM.Leave a comment:
-
Yes, I realize your motor was compromised during testing, one more reason to be impressed.Originally posted by Midaztouch View Post
Once you get your machine repaired, you can get a rough estimate of available horsepower and efficiency without using a dyno:
1. Measure the weight of your rotor and shaft assembly
2. Put your current clamp around the battery lead
3. Set your tachometer up to read rpm
4. Fire that baby up
5. When the motor reaches operating speed, save the current clamp reading and the tach speed simultaneously (its hard to do).
Calculate the input: Supply (Volts) X Current (Amps) = Input Watts
Now you can use the same formula we discussed earlier.
Weight (LBS) x RPM/5252 = Horsepower X .756 = Output Watts
Divide output Watts by input Watts, move the decimal point to the right two places and you get the motors efficiency (approximately).
This may seem like a lot of trouble to go thru, but you will never know if this motor design is worse-good-better or best when compared to other designs.
Horsepower and efficiency are the only factors to consider when comparing motors. Anything can spin around, but motors are for doing work- which translates into horsepower.
You should be very happy with the machine you built. It's solid and quite a runner. Balancing is a time consuming practice and requires special equipment. You may find a local motor rewind shop or motorcycle shop that can do it for you. It's worth the effort (higher rpm and much safer).

Leave a comment:
-
The Contest has only begun
@Sampojo
I think that both the AN1 and AN2 are hugely successful and it is a little early in the contest to declare one a winner. What I think is developing is unique characteristics in each winding that we may be able to exploit for different purposes. I am still mulling over the results in absolute amazement that the timing could make such a radical difference in power consumption. I expected better results but not such huge differences as I have seen. Many tests remain to be conducted and are scheduled this week as time permits. Having finally gotten to the point of knowing how to document this process efficiently they should go much smoother and easier.
Cheers
GarryLeave a comment:
-
Timing positions on The Battle of The Windings
@ufoOriginally posted by Ufopolitics View Post
T1 is the setting that goldmine has selected for the goldmine motor. Unfortunate design in the brush holders makes it very difficult to calculate their starting angle for the brushes because the brushes come together at a different angle when the rotor is removed. So all of the other timing positions are relative to that position. You are correct in that T2 and also T3 favor the attraction mode of the motor winding. T2 is approximately 5 to 7 degrees rotation towards the south stator this definitely favors the attraction mode. T3 is approximately 10 to 14 degrees rotation towards the south stator.
T3 and T4 are the exact opposite in relation to T1. They both favor the repulsion mode. Midaz can't seem to grasp this simple fact that the ideal position for AN2 is the T1 timing position. One final note on this. These are very crude timing positions. I have not had enough time to try to dial these in. In the automobile industry a 5 to 7 degree jump would be unheard of. Here 1 degree could make a huge difference in performance. Taking the AN2 for example this rotor could find better performance by going in the center of position 1 or 2 and testing it and then trying the center of the position 2 or 3. Time constraints will only let me go so far with these tests. I think the point has been made though. Finding the sweet spot through testing can yield significant improvement in the motor's efficiency.
I have a number of tests that are scheduled this week that will begin to exploit the asymmetrical side of our motors. This is going to get very interesting indeed.
Cheers
GarryLeave a comment:






Leave a comment: