 Tweet
Tweet
Originally posted by soundiceuk
View Post
I think we are all familar with Moment of Inertia and once we have 250 kg moving along at a fairly good clip, a 6.5 kg weight is probably barely noticable to the wheel. Time is available for opposing viewpoints...

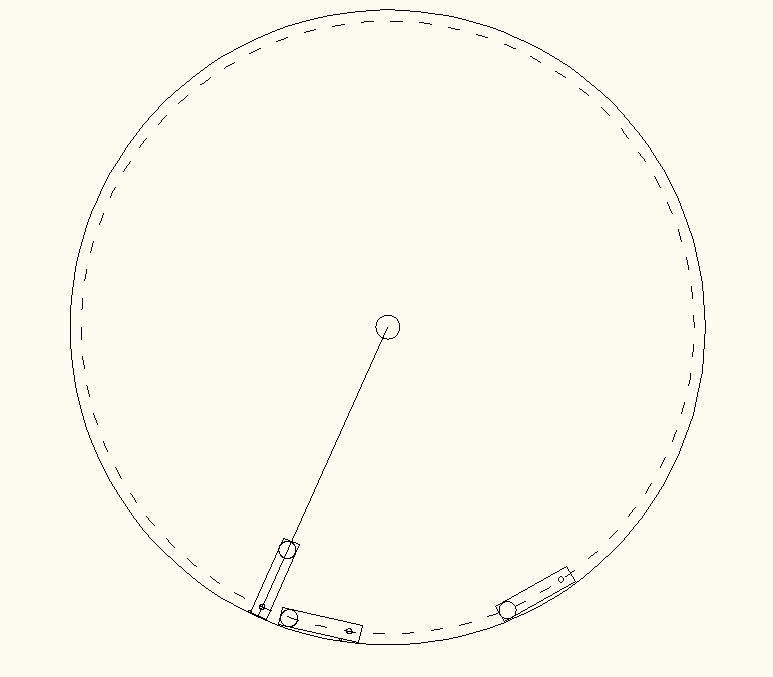
 I'm also working on a side project with one arm and one moving weight specifically to study the optimum movement/location of that weight with respect to overall rotation. If I learn anything new, I will definitely share it here.
I'm also working on a side project with one arm and one moving weight specifically to study the optimum movement/location of that weight with respect to overall rotation. If I learn anything new, I will definitely share it here.



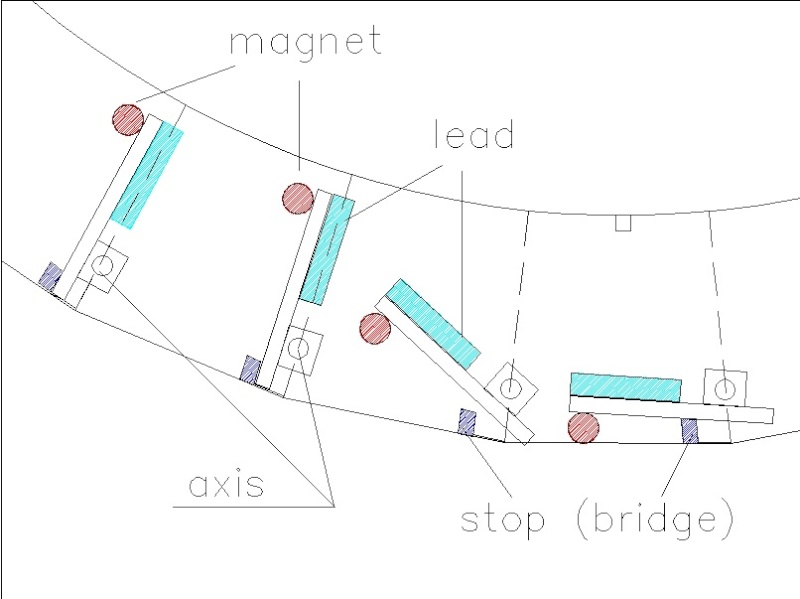
 mitriev grav-mag-mot diagram 400.gif - PESWiki
mitriev grav-mag-mot diagram 400.gif - PESWiki






Comment