 Tweet
Tweet
Update 28th January 2013
Gravity Wheel Group Project Contributors
soundiceuk (Paul Townley) �200
Regster �20
Drak $15
Kind US friend $85
PhysicsProf (Steven Jones) $15
Swampwalker (John) �45
Gdez (Greg) $25
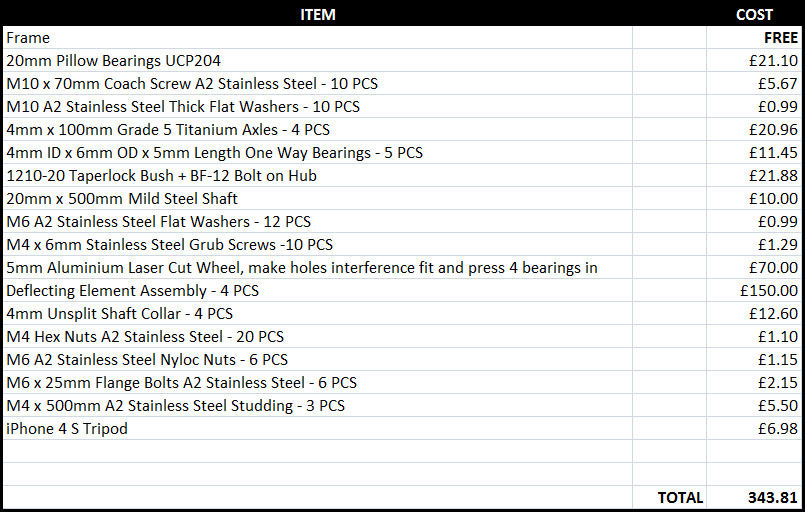
TOTAL PAID INTO GROUP POT �344 (APPROX $543 USD)
At the moment we have one out of three monitors working. Both laptop batteries are scrap. One laptop charger and a mouse not working.
The other thing that annoyed me is I paid for a lifetime license of AVS Video Editor back in 2008. Now they have "lost" any record of this and tried to accuse me of running the software on multiple machines.
Hopefully this will get resolved.
I'm pretty much out of hard drive space.... it's all a juggling act!
I'm pretty broke for a few weeks now, so I will get to work on the design upgrades.
Here are the group replication accounts.
All the best,
Paul
Gravity Wheel Group Project Contributors
soundiceuk (Paul Townley) �200
Regster �20
Drak $15
Kind US friend $85
PhysicsProf (Steven Jones) $15
Swampwalker (John) �45
Gdez (Greg) $25
TOTAL PAID INTO GROUP POT �344 (APPROX $543 USD)
At the moment we have one out of three monitors working. Both laptop batteries are scrap. One laptop charger and a mouse not working.
The other thing that annoyed me is I paid for a lifetime license of AVS Video Editor back in 2008. Now they have "lost" any record of this and tried to accuse me of running the software on multiple machines.
Hopefully this will get resolved.
I'm pretty much out of hard drive space.... it's all a juggling act!
I'm pretty broke for a few weeks now, so I will get to work on the design upgrades.
Here are the group replication accounts.
All the best,
Paul





Comment