 Tweet
Tweet
Geometry
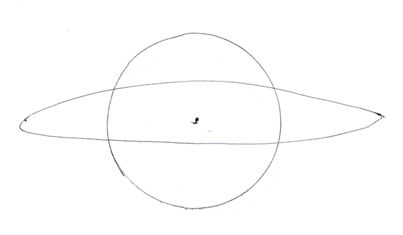
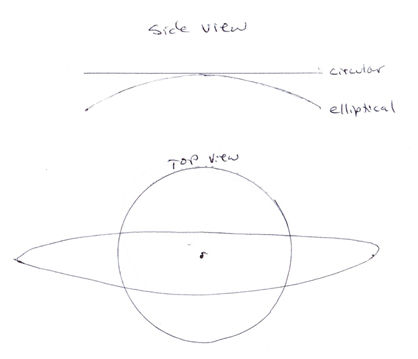
Armandino, let me recount my impressions of the geometry of the original Skinner machine. To me, it appears that the top of the lower shaft moves in a circle of about 4--5 inches.
I believe that the bottom of the upper shaft moves in a circle or ellipse that is the same size. From the bottom of the upper shaft to the gimbal is about 1 foot. It is about 4 feet to the top of the upper shaft. The circle (or ellipse) that is described by the top of the upper shaft is dictated by this ratio. The top of upper shaft will move in a circle that is 4 times the diameter of the circle travelled by the bottom of the upper shaft.
I can't say if the top of the upper shaft runs in a circle or an ellipse. But, I believe that the ratio between the part below the gimbal and part above the gimbal is an important aspect.
The original vid shows a (almost) side view. If you watch the 4 shafts, the amplitude of movement appears to be close to equal. Are 2 of the gimbals in side view while 2 of the gimbals are in end view? I can't say.
The lower shaft pivots / rotates at it's lowest point. The upper shaft rotates at a mid-point (not in the middle, naturally). The upper shaft uses leverage to move the weight,,, the lower shaft does not.
Armandino, let me recount my impressions of the geometry of the original Skinner machine. To me, it appears that the top of the lower shaft moves in a circle of about 4--5 inches.
I believe that the bottom of the upper shaft moves in a circle or ellipse that is the same size. From the bottom of the upper shaft to the gimbal is about 1 foot. It is about 4 feet to the top of the upper shaft. The circle (or ellipse) that is described by the top of the upper shaft is dictated by this ratio. The top of upper shaft will move in a circle that is 4 times the diameter of the circle travelled by the bottom of the upper shaft.
I can't say if the top of the upper shaft runs in a circle or an ellipse. But, I believe that the ratio between the part below the gimbal and part above the gimbal is an important aspect.
The original vid shows a (almost) side view. If you watch the 4 shafts, the amplitude of movement appears to be close to equal. Are 2 of the gimbals in side view while 2 of the gimbals are in end view? I can't say.
The lower shaft pivots / rotates at it's lowest point. The upper shaft rotates at a mid-point (not in the middle, naturally). The upper shaft uses leverage to move the weight,,, the lower shaft does not.
Comment