 Tweet
Tweet
synchronous design?
Thanks Tom, We will never know until we try. The dispersion of energy via counterbalance is not an element I am concerned with at this stage. I chose 5 because it was easy for me to understand how to build. 6-8-or 12 would have been fine choices as well but I wanted to keep it modest and learn as much as possible about the dynamics of a fine tuned and productive model. That is really the only reason. NOT Another reason is I had convenient drive motors that can be powered with little energy and a belt drive that requires a near friction-less machine to drive. If I am correct my motor will lift 4.5 lbs "5 Pepsi cans" My wife( lives on pepsi)and spin them. I do not know how much energy that will be but it is a simple math equation to figure it out. Thirdly The drive shafts and u-joints were cheep, and bearings too. Well there were other reasons that I chose this size but to answer the question about balance. I believe the geometric pattern I chose has a 25 percent better balance than Skinner's. I may be wrong; but it won't. My shop is really poor.
My point is two fold.... Skinner took 14 years and built at least 4 various models. There is no way I could possibly understand everything he had learned by watching the video and summarily building one of my own units out of balsa wood and particle board.
I really have an advantage of starting my build with this small scale and lite wood parts. Really I can readily see where the weaknesses are and look to the outcome to see the strengths, or the structural strength needed for each component. There is really a lot of heavy duty math timing and engineering in this machine of Skinner's and that is what makes it fun for me.
Really This is a learning experience and I am having fun doing it and sharing.
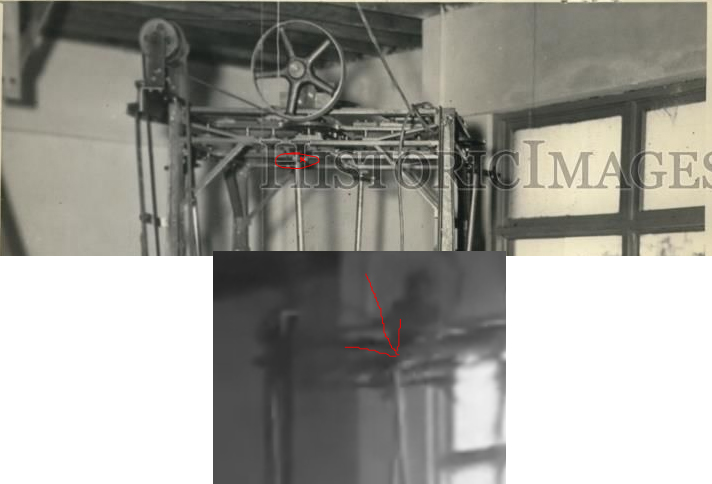
I am next to the stage of reinforcing the rotary drive fulcrums. the motor driver is rotating in an adjustable circle that can rotate as far as 3.5" all the way down to (0). without any stabilization. I can get rotation at about 1" circular motion. The deflection reduces the actual action to about 1/3 to 5/8 "of that 1". with stabilization I should be able to get 80 to 95% with pepsi. This driver is Monosynchronous, My meaning is all units will turn to the same clock position at all times. My reasoning is this: My unit will only be driven to an RPM that will inhibit all spurious energy ie; excessive centrifugal energy. I do believe this can be useful but at this stage I will be more concerned with understanding the counterbalance weight and what it's purpose is!
Thanks for the comment Tom
Originally posted by goldpro
View Post
My point is two fold.... Skinner took 14 years and built at least 4 various models. There is no way I could possibly understand everything he had learned by watching the video and summarily building one of my own units out of balsa wood and particle board.
I really have an advantage of starting my build with this small scale and lite wood parts. Really I can readily see where the weaknesses are and look to the outcome to see the strengths, or the structural strength needed for each component. There is really a lot of heavy duty math timing and engineering in this machine of Skinner's and that is what makes it fun for me.
Really This is a learning experience and I am having fun doing it and sharing.
I am next to the stage of reinforcing the rotary drive fulcrums. the motor driver is rotating in an adjustable circle that can rotate as far as 3.5" all the way down to (0). without any stabilization. I can get rotation at about 1" circular motion. The deflection reduces the actual action to about 1/3 to 5/8 "of that 1". with stabilization I should be able to get 80 to 95% with pepsi. This driver is Monosynchronous, My meaning is all units will turn to the same clock position at all times. My reasoning is this: My unit will only be driven to an RPM that will inhibit all spurious energy ie; excessive centrifugal energy. I do believe this can be useful but at this stage I will be more concerned with understanding the counterbalance weight and what it's purpose is!
Thanks for the comment Tom







Comment