 Tweet
Tweet
In the thread about the Witts generator, I posted quite some information about the device which has been demonstrated by Witts, which is nothing other than the experimental "Ecklin Variable Releluctance Generator" built by none other than Ronald Brandt. The same Ron Brandt, which gave John Bedini the plans for what is now called the "Tesla Switch":
http://www.energeticforum.com/renewa...tml#post297009
From an article about Ron Brandt's devices from 1994, it becomes clear that the plans the QEG project is based on, are not the actual plans for Ron's device, but those of the Ecklin's device, about which Ron said something was missing, which he added in order to make it work. After that, he designed his Perm-Mag motor in order to come to further improvements, of which obviously the most important ingredient would be the addition of a permanent magnet to the rotor. In other words, the quest by the QEG team for finding "resonance" is a fruitless endeavor, because the secret is in the magnetic flux switching principle and not in the optimization thereof.
Now that the plans of his Perm-Mag motor have been released, we can reconstruct the story, understand the principle he utilized, magnetic flux switching (as in the MEG), and come to proposals how to make the QEG actually working.
Let me post a summary of the info here and create a new thread for this discussing this.
----
Do you know what this thing actually is and who built it??
It's Ron Brandt's "Ecklin Variable Reluctance Generator". See page 14 in this pdf, with a photograph of (the main frame of) the exact same device:
http://www.tuks.nl/pdf/Reference_Mat...sue-4-1994.pdf
Recently, they released these video's, which contain a presentation by Ron Brandt with his motor:
https://www.youtube.com/channel/UCf0...4m-byUpNTRZcTg
You can find more about this Ecklin device here:
John W Ecklin -- Stationary armature generator -- US Patent 3879633, US Patent 4567407, 12 articles
Ron's Ecklin device seems to have been his first prototype, which eventually led to his PermMag motor, of which they've made the plans available on Google drive just months ago:
FREE Ron Brandt Plans
From what I make of it, this is essentially "magnetic flux switching" technology, the same principle as has been patented as the "MEG" by a/o Tom Bearden. His colleagues posted a very interesting video, explaining how they got to the MEG design and how "flux switching" works:
https://youtu.be/no50_5iSr2Y
Ok, that explains quite a lot.
So, this is the story as far as I am able to reconstruct:
*) During the 70's, Ron Brandt built an electric car, powered by a circuit now called the "Tesla Switch", a scaled down version of which was demonstrated in 1984 by John Bedini.
*) In the 1980s, Ron started working on magnetic motors based on "flux switching", based on Ecklin's theory. His "Ecklin Variable Reluctance Generator" was the first experimental device he build, with which he could achieve a COP of 1.05 (105%), which was unsatisfactory to him.
*) Ron designed a new type of motor, his Perm-Mag motor, whereby he placed magnets at the inside of a rotating cylinder, rotating around the stator. Because the magnets are supported by the cylinder, they can't "fly away" at high RPMs. He built (at least) two prototypes, of which he demonstrated the smaller one at the "Extraordinary Science Conference" in 1995. A video of his presentation has recently been made available by witts.
*) Ron kept on experimenting with these two Perm-Mag motors, rewinding them every now and then.
*) In January, 2010, Witts posts a video with a demonstration of Ron's variable reluctance prototype:
https://www.youtube.com/watch?v=LFu-s6ZmGyE
*) After Ron passed away in 2010, Witts got hold of at least his variable reluctance prototype and possibly also the Perm-Mag motors. Apparently the only prototype still in a working condition was the variable reluctance prototype, which - according to Ron - could only do a COP of about 1.05.
In the paper referenced earlier, there's another interesting photo at page 15:
It's caption reads:
That's rather interesting, because the Ecklin patent shows a two-pole rotor and it is pretty clear Ron's device incorporates four stator poles. That already hints in the direction of utilizing magnetic flux switching, as is also being done in the MEG. Further, in the plans for Ron's Perm-Mag motor released by Witts, there is a directory about Joseph Newmann's motor and a directory about "their" "flux switching transformer", which IS the MEG and also refers to Naudin's Meg page:
I highly recommend watching this video by Lee Kenny, one of the inventors of the MEG, which shows you exactly how magnetic flux switching works and how they got to the current design of the MEG:
https://youtu.be/no50_5iSr2Y
Now take a look at what you can see from the actual rotor in the demonstration video by Witts:
https://youtu.be/LFu-s6ZmGyE?t=2m50s
Does this look anything like the rotor they are using in the QEG?
No, it looks like a disc on which something is mounted with a screw...
Now remember, this is Ron's experimental prototype, and in his presentation he says the Ecklin device was only theory and that he added something with which he has been able to make it work. And also remember that the knowledge he gained from experimenting with this device allowed him to design his Perm-Mag motor.
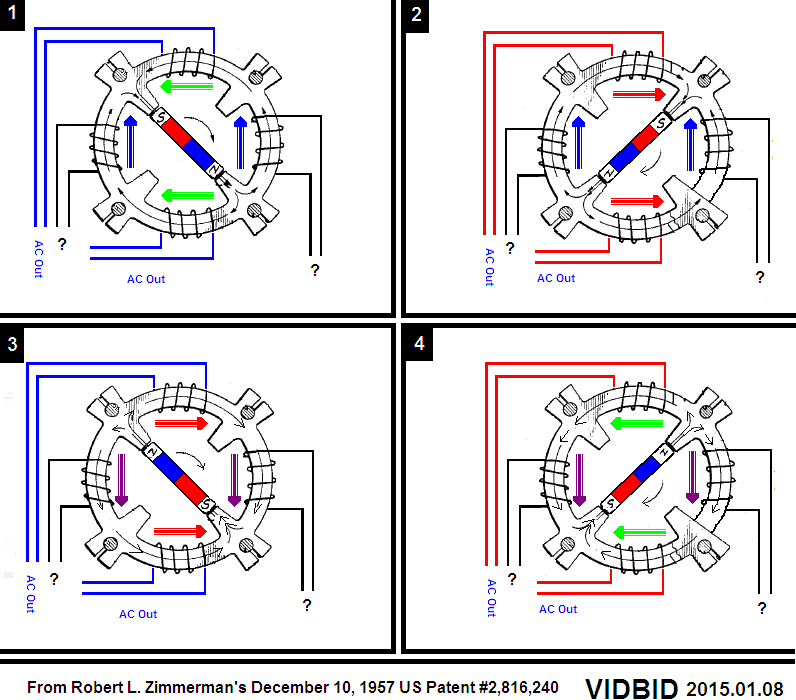
So, it seems clear that a permanent magnet needs to be part of the rotor in order to get a COP>1, which would suggest a rotor as in the Zimmerman patent as posted by vidbid:
https://www.google.com/patents/US2816240
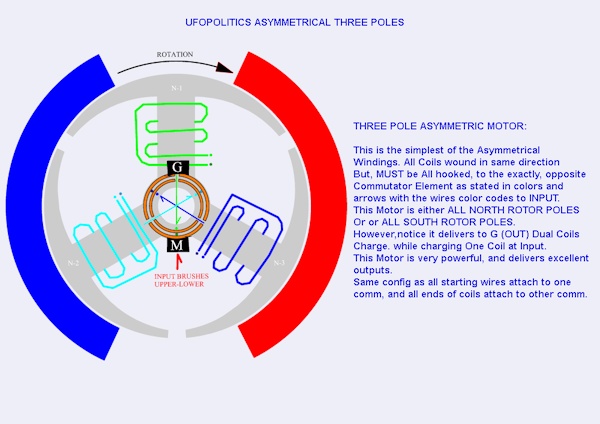
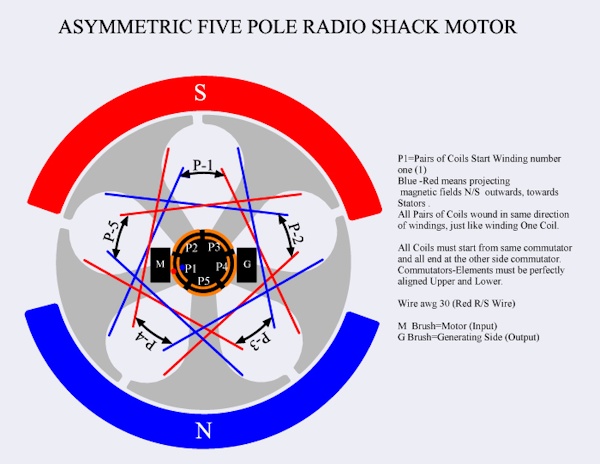
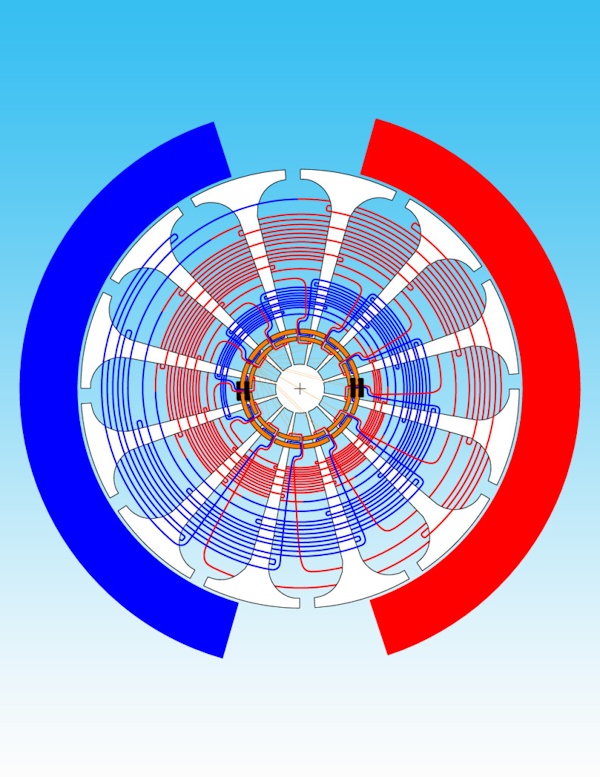
However, with a rotor shaped like this, there is no way you can smoothly switch the magnetic flux of the permanent magnet from one set of poles to the next, so you would need a rotor specifically designed for flux switching, which brings me to some pictures posted by UfoPolitics in his thread a while ago:
http://www.energeticforum.com/renewa...-machines.html
http://www.tuks.nl/img/UfoPolitics_Free_Energy/img/
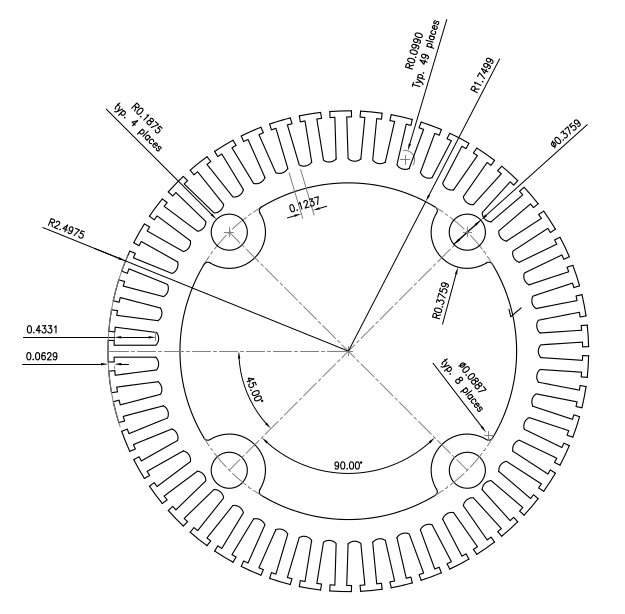
Now let's compare this to Ron's stator design, which is supposed to have 49 gaps (so 50 "pins"). Like Ron, I didn't count them in this image, but there should be 49 gaps:
And this is how this looks like in the big prototype of his Perm-Mag motor:
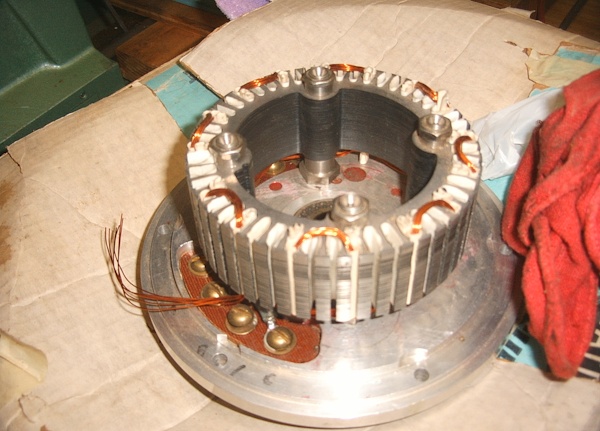
High res: http://www.tuks.nl/img/Brandt_Stator_photo.jpg
If I counted correctly, in Ron's Perm-Mag motor there's three stator pins for every magnet, allowing the magnetic flux from every rotating magnet to find a path trough multiple pins and smoothly switch from one pin to the next. All one needs to do is to direct the magnetic flux trough a pin you'd like it to go trough, as explained by Bearden's colleages in their video. All it takes to do that, it to pulse a coil around the pin you'd like the flux to go trough next.
An important difference between Ron's design and UfoPolitics is that with Ron's motor, the magnets are rotating and no brushes are required, while with UfoPolitics version, it's the other way around.
The photograph suggests Ron, like UfoPolitics, wound his coils around three stator pins at a time (covering one magnet), but he re-wound his motors multiple times, so it's definitely not certain this way of winding is best.
The challenge to get the QEG working is not to find some kind of "resonance". Yes, there are optimal frequencies to work with and probably you need to work around those frequencies in order to get a COP >> 1, but that's not the essential point.
What is essential with these kinds of motor/generators is the way the flux is being switched/directed from one set of poles to the next. From the video revealing the actual rotor and the fact Ron also had a 6-pole rotor for the device, it is clear that Ron experimented with the rotor and that the addition of a permanent magnet is what made the difference.
What he found out is that he could not run his first "Ecklin" device at high RPMs, because of centripetal forces acting on the magnets in the rotor, which is why he designed a rotor consisting of a cylinder, which prevents the magnets from being ripped of the rotor at high RPMs. Also, the magnets on his Perm-Mag rotor were slightly bent, so there is very little space between the rotor and the stator (magnets) during operation.
So, in order to get the QEG working with a COP>1, one needs to design a rotor for this device, which incorporates at least one permanent magnet, in such a way that the magnetic flux can be directed from one set of poles to the next smoothly.
The rotor should have a number of poles, shaped like in UfoPoltics' pictures, whereby the end of the pole is wide enough to partly cover two stator poles during the flux switching process. And as said, somewhere in the rotor, there should be a permanent magnet. For a two-pole (magnetic) rotor rotating in a 4-pole stator (as the QEG is currently designed), the end of the poles should be about 90 degrees and probably slightly more than 90 degrees.
Then, just at the moment the pole comes into the vicinity of the next stator pole, the coil aligned with the desired new flux path is to be pulsed in order to direct the flux pro-actively into the desired direction at the desired moment. This will magnetize the rotor pole into attraction mode at the weak pole where we want the torque to go to, while at the same time de-magnetizing the strong pole, which we don't want to be attracting anymore, since that would slow the rotor down.
When this is achieved, COP > 1 operation should be possible with the QEG design, although in order to obtain a really powerful motor/generator, one would have to follow Ron's Perm-Mag design and move the rotor magnets to the outside in order to be able to keep the magnets in place.
However, one should be able to get a long way by designing a laminated rotor in which a permanent magnet is enclosed.
http://www.energeticforum.com/renewa...tml#post297009
From an article about Ron Brandt's devices from 1994, it becomes clear that the plans the QEG project is based on, are not the actual plans for Ron's device, but those of the Ecklin's device, about which Ron said something was missing, which he added in order to make it work. After that, he designed his Perm-Mag motor in order to come to further improvements, of which obviously the most important ingredient would be the addition of a permanent magnet to the rotor. In other words, the quest by the QEG team for finding "resonance" is a fruitless endeavor, because the secret is in the magnetic flux switching principle and not in the optimization thereof.
Now that the plans of his Perm-Mag motor have been released, we can reconstruct the story, understand the principle he utilized, magnetic flux switching (as in the MEG), and come to proposals how to make the QEG actually working.
Let me post a summary of the info here and create a new thread for this discussing this.
----
Do you know what this thing actually is and who built it??
It's Ron Brandt's "Ecklin Variable Reluctance Generator". See page 14 in this pdf, with a photograph of (the main frame of) the exact same device:
http://www.tuks.nl/pdf/Reference_Mat...sue-4-1994.pdf
Recently, they released these video's, which contain a presentation by Ron Brandt with his motor:
https://www.youtube.com/channel/UCf0...4m-byUpNTRZcTg
You can find more about this Ecklin device here:
John W Ecklin -- Stationary armature generator -- US Patent 3879633, US Patent 4567407, 12 articles
Ron's Ecklin device seems to have been his first prototype, which eventually led to his PermMag motor, of which they've made the plans available on Google drive just months ago:
FREE Ron Brandt Plans
From what I make of it, this is essentially "magnetic flux switching" technology, the same principle as has been patented as the "MEG" by a/o Tom Bearden. His colleagues posted a very interesting video, explaining how they got to the MEG design and how "flux switching" works:
https://youtu.be/no50_5iSr2Y
Originally posted by QEG
View Post
So, this is the story as far as I am able to reconstruct:
*) During the 70's, Ron Brandt built an electric car, powered by a circuit now called the "Tesla Switch", a scaled down version of which was demonstrated in 1984 by John Bedini.
*) In the 1980s, Ron started working on magnetic motors based on "flux switching", based on Ecklin's theory. His "Ecklin Variable Reluctance Generator" was the first experimental device he build, with which he could achieve a COP of 1.05 (105%), which was unsatisfactory to him.
*) Ron designed a new type of motor, his Perm-Mag motor, whereby he placed magnets at the inside of a rotating cylinder, rotating around the stator. Because the magnets are supported by the cylinder, they can't "fly away" at high RPMs. He built (at least) two prototypes, of which he demonstrated the smaller one at the "Extraordinary Science Conference" in 1995. A video of his presentation has recently been made available by witts.
*) Ron kept on experimenting with these two Perm-Mag motors, rewinding them every now and then.
*) In January, 2010, Witts posts a video with a demonstration of Ron's variable reluctance prototype:
https://www.youtube.com/watch?v=LFu-s6ZmGyE
*) After Ron passed away in 2010, Witts got hold of at least his variable reluctance prototype and possibly also the Perm-Mag motors. Apparently the only prototype still in a working condition was the variable reluctance prototype, which - according to Ron - could only do a COP of about 1.05.
In the paper referenced earlier, there's another interesting photo at page 15:
It's caption reads:
Ron Brandt holding a six-pole rotor of an Ecklin variable reluctance motor-generator. There's a two-pole rotor in the box.
Replications & Additional Technical Data:
The MEG - "Motionless Electromagnetic Generator" from Tom Bearden
The MEG - "Motionless Electromagnetic Generator" from Tom Bearden
https://youtu.be/no50_5iSr2Y
Now take a look at what you can see from the actual rotor in the demonstration video by Witts:
https://youtu.be/LFu-s6ZmGyE?t=2m50s
Does this look anything like the rotor they are using in the QEG?
No, it looks like a disc on which something is mounted with a screw...
Now remember, this is Ron's experimental prototype, and in his presentation he says the Ecklin device was only theory and that he added something with which he has been able to make it work. And also remember that the knowledge he gained from experimenting with this device allowed him to design his Perm-Mag motor.
So, it seems clear that a permanent magnet needs to be part of the rotor in order to get a COP>1, which would suggest a rotor as in the Zimmerman patent as posted by vidbid:
https://www.google.com/patents/US2816240
However, with a rotor shaped like this, there is no way you can smoothly switch the magnetic flux of the permanent magnet from one set of poles to the next, so you would need a rotor specifically designed for flux switching, which brings me to some pictures posted by UfoPolitics in his thread a while ago:
http://www.energeticforum.com/renewa...-machines.html
http://www.tuks.nl/img/UfoPolitics_Free_Energy/img/
Now let's compare this to Ron's stator design, which is supposed to have 49 gaps (so 50 "pins"). Like Ron, I didn't count them in this image, but there should be 49 gaps:
And this is how this looks like in the big prototype of his Perm-Mag motor:
High res: http://www.tuks.nl/img/Brandt_Stator_photo.jpg
If I counted correctly, in Ron's Perm-Mag motor there's three stator pins for every magnet, allowing the magnetic flux from every rotating magnet to find a path trough multiple pins and smoothly switch from one pin to the next. All one needs to do is to direct the magnetic flux trough a pin you'd like it to go trough, as explained by Bearden's colleages in their video. All it takes to do that, it to pulse a coil around the pin you'd like the flux to go trough next.
An important difference between Ron's design and UfoPolitics is that with Ron's motor, the magnets are rotating and no brushes are required, while with UfoPolitics version, it's the other way around.
The photograph suggests Ron, like UfoPolitics, wound his coils around three stator pins at a time (covering one magnet), but he re-wound his motors multiple times, so it's definitely not certain this way of winding is best.
What this means for getting the QEG working.
The challenge to get the QEG working is not to find some kind of "resonance". Yes, there are optimal frequencies to work with and probably you need to work around those frequencies in order to get a COP >> 1, but that's not the essential point.
What is essential with these kinds of motor/generators is the way the flux is being switched/directed from one set of poles to the next. From the video revealing the actual rotor and the fact Ron also had a 6-pole rotor for the device, it is clear that Ron experimented with the rotor and that the addition of a permanent magnet is what made the difference.
What he found out is that he could not run his first "Ecklin" device at high RPMs, because of centripetal forces acting on the magnets in the rotor, which is why he designed a rotor consisting of a cylinder, which prevents the magnets from being ripped of the rotor at high RPMs. Also, the magnets on his Perm-Mag rotor were slightly bent, so there is very little space between the rotor and the stator (magnets) during operation.
So, in order to get the QEG working with a COP>1, one needs to design a rotor for this device, which incorporates at least one permanent magnet, in such a way that the magnetic flux can be directed from one set of poles to the next smoothly.
The rotor should have a number of poles, shaped like in UfoPoltics' pictures, whereby the end of the pole is wide enough to partly cover two stator poles during the flux switching process. And as said, somewhere in the rotor, there should be a permanent magnet. For a two-pole (magnetic) rotor rotating in a 4-pole stator (as the QEG is currently designed), the end of the poles should be about 90 degrees and probably slightly more than 90 degrees.
Then, just at the moment the pole comes into the vicinity of the next stator pole, the coil aligned with the desired new flux path is to be pulsed in order to direct the flux pro-actively into the desired direction at the desired moment. This will magnetize the rotor pole into attraction mode at the weak pole where we want the torque to go to, while at the same time de-magnetizing the strong pole, which we don't want to be attracting anymore, since that would slow the rotor down.
When this is achieved, COP > 1 operation should be possible with the QEG design, although in order to obtain a really powerful motor/generator, one would have to follow Ron's Perm-Mag design and move the rotor magnets to the outside in order to be able to keep the magnets in place.
However, one should be able to get a long way by designing a laminated rotor in which a permanent magnet is enclosed.


Comment